SupMod Rules¶
This is the documentation of the rule Supervisor module (SupMod). The module takes an ego-trajectory as input and rates the safety w.r.t. applicable rules in a static environment.
Overview¶
The module (Figure 1) consists of a a number of rules (all implemented in the main file). Further details are given in the following section.
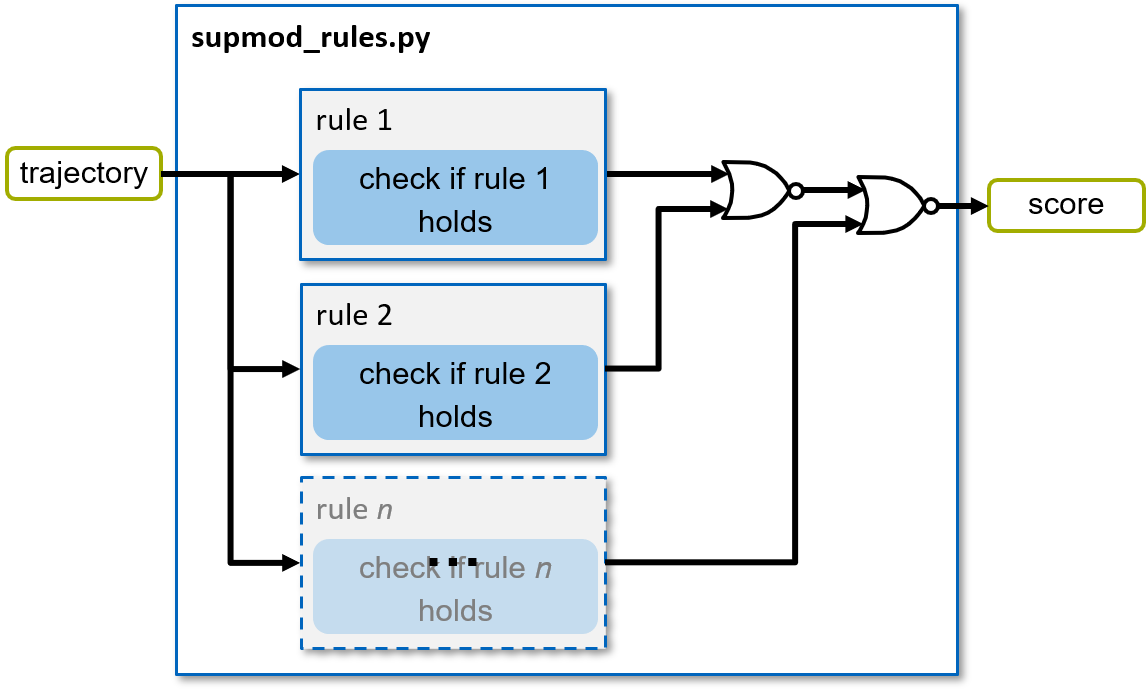
Figure 1: Structure of the supmod_rules.
Rules¶
In order to check for whether the provided trajectory is rule conform, it is checked, whether all formalized rules in this module hold. Currently, the following illustrative rules are implemented:
Adherence to maximum velocity defined per event / by race control
Exclusion of backward movements (negative velocities)
Adherence to maximum braking deceleration (specified by event / race control)
Warning
Currently, only an exemplary number of rules have been implemented. The formalization of further rules must be investigated depending on the application. In addition, only rules in the static environment are reviewed here. Collisions (caused by the ego-vehicle) with other road users are handled via the other SupMods. This satisfies the safety objective supported here (avoidance of self-caused collisions). However, if the Supervisor is still to guarantee compliance with the rules of the trajectory planner, the dynamic environment must also be included.